tieni premuto il pulsante BOOTSEL sul tuo Pico e collegalo alla porta USB del tuo PC, una volta collegato rilascia il pulsante
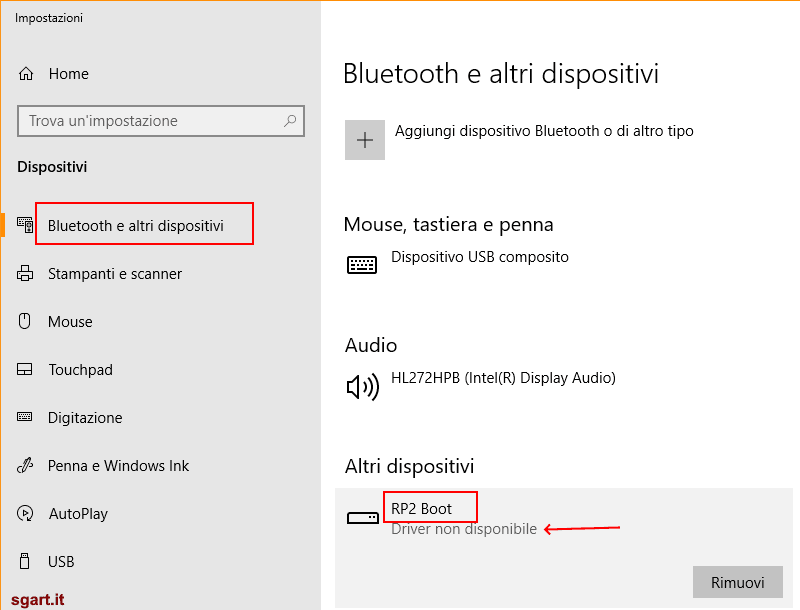
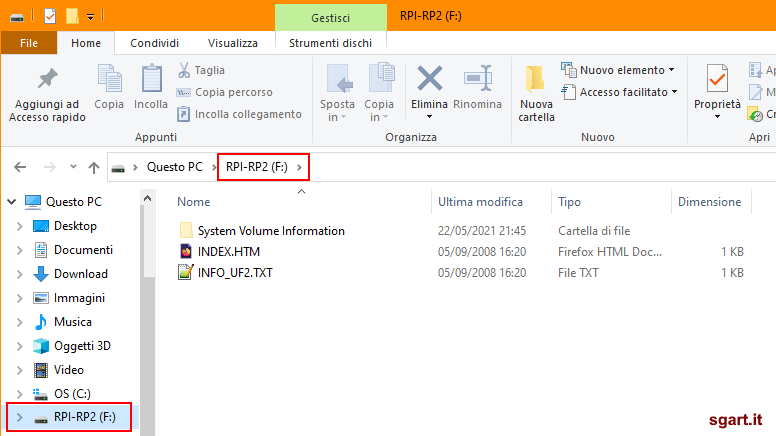
Verrà montato come dispositivo di archiviazione di massa chiamato RPI-RP2
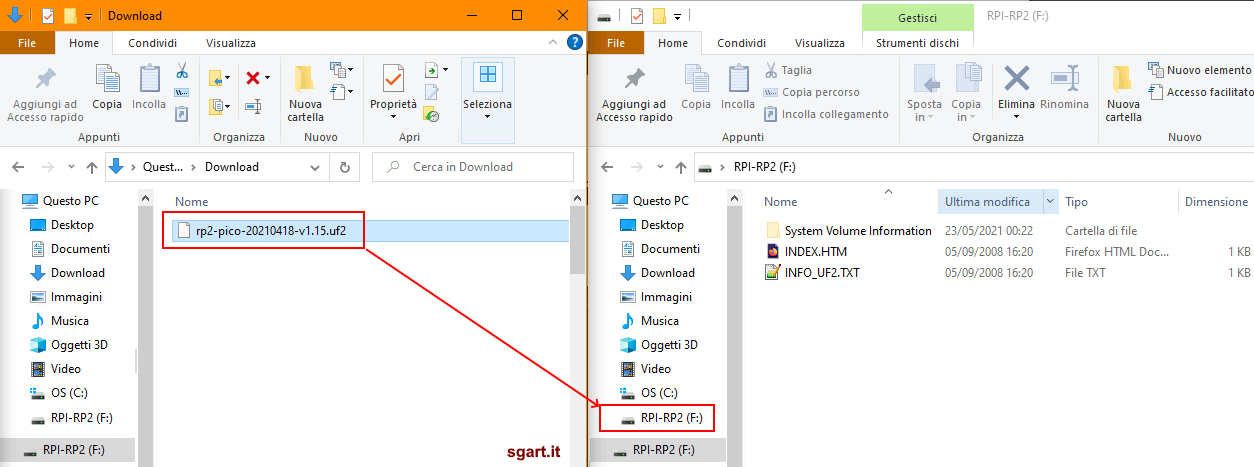
trascina e rilascia il file MicroPython UF2 sul volume RPI-RP2, il Pico si riavvierà, MicroPython è installato.
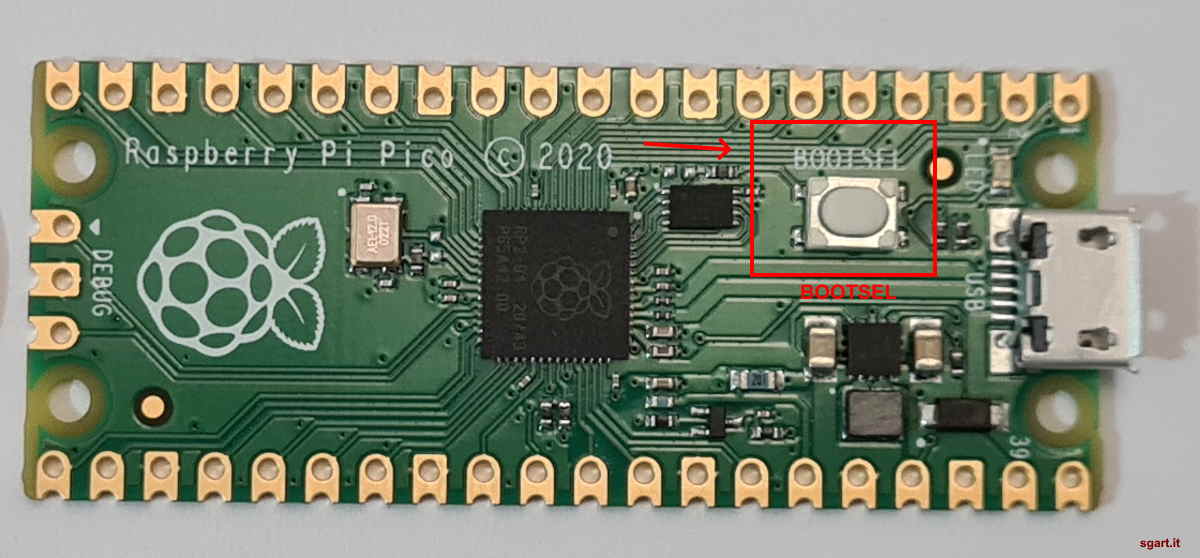
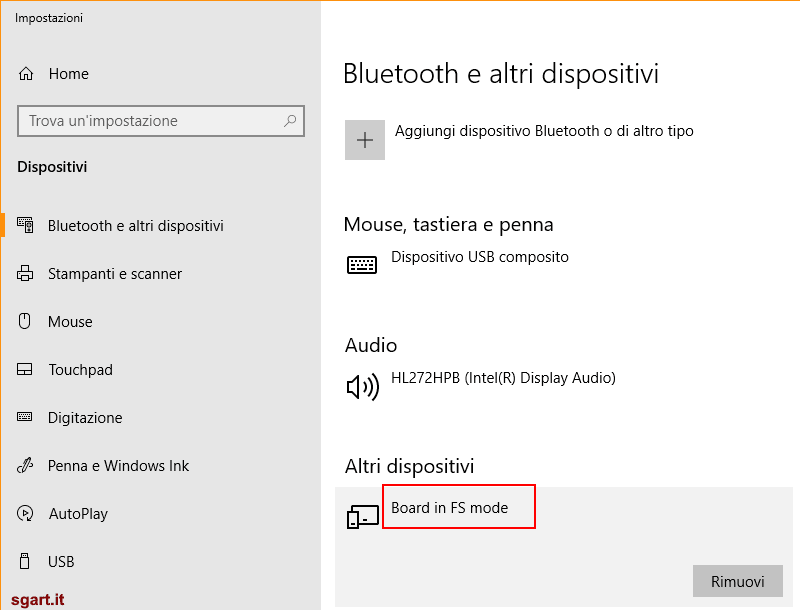
Il tasto BOOTSEL è quello evidenziato in fotoTasto BOOTSELFinché non viene installato MicroPython, Pico comparirà come periferica USB non riconosciuta (RP2 Boot)Pico non installatoma sarà comunque visibile come dispositivo di archiviazionePico non installatoUna volta scaricato e fatto il drag & drop del file MicroPython UF2 Installazione MicroPythonsarà visualizzato in questo modo Board in FS modePico installatoIl Pico è pronto per essere programmato.
Utilizzo di VS Code
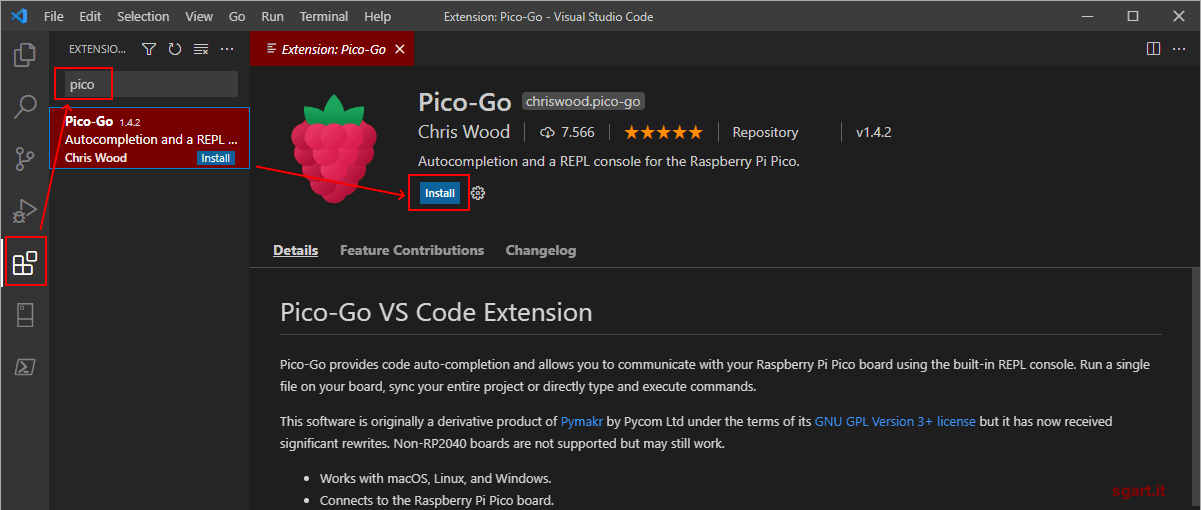
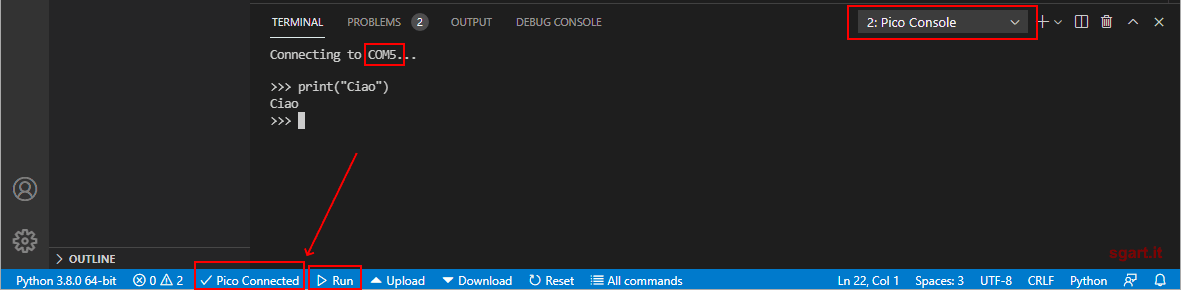
Per utilizzare Visual Studio Code è necessario installare l'estensione Pico-Go VS Code ExtensionEstensione Pico-Gose tutto è andato a buon fine nella barra in basso deve comparire la dicitura Pico Connected e visualizzata la console Pico Console dove è possibile inserire i comandi MicroPython Estensione Pico-Go
In questa fase viene anche visualizzata la porta a cui è connesso il Pico, nell'esempio COM5. I tre simboli di maggiore >>> indicano che il Read–Eval–Print Loop (REPL) di Pico è pronto a ricevere comandi.
Configurazione progetto
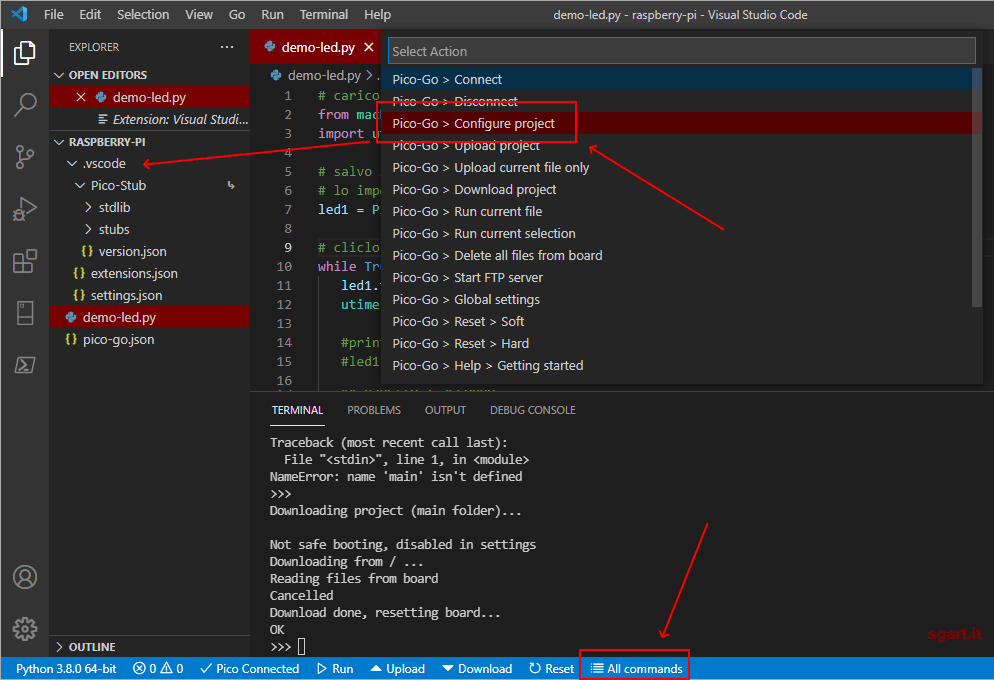
Tramite il comando All Commands / Configure project è possibile impostare il progetto in automatico perché sia configurato con tutte le dipendenze necessarieconfigurazione progettoQuesto crea la cartella .vscode con, tra le altre cose, le librerie MicroPython e un file pico-go.json
JSON: pico-go.json
{
"sync_folder": "",
"open_on_start": true
}
in ultimo visualizza le estensioni consigliate per questo tipo di progetto.
Lampeggio di un LED in MicroPython
Come primo programma di esempio, facciamo lampeggiare il LED incorporato nel controller PicoLED on-boardCrea un file demo-led.py (il nome file non è importante) e inserisci il codice seguente
Python: demo-led.py
# carico le librerie necessarie
from machine import Pin
import utime
# salvo in una variabile il pin collegato al LED interno (built-in)
# lo imposto in modalità OUTPUT
led1 = Pin(25, Pin.OUT)
# cliclo all'infinito
while True:
print("LED acceso")
led1.value(1)
# aspetto 1 secondo
utime.sleep(1)
print("LED spento")
led1.value(0)
# aspetto 1 secondo
utime.sleep(1)
Dove:
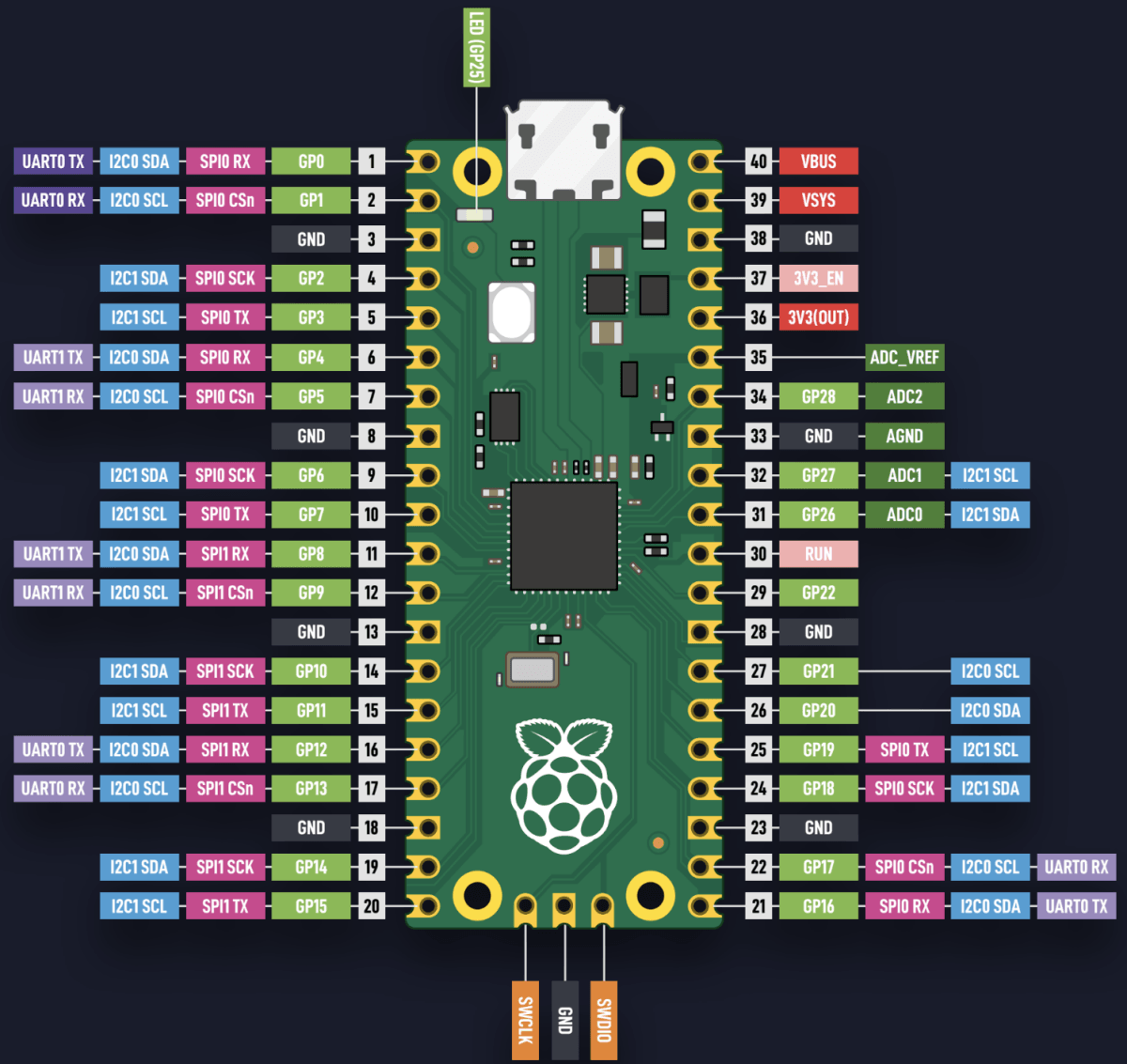
Pin(25, Pin.OUT) imposta il pin 25, dove è collegato il LED interno, in output
led1.value(...) permette di impostare la corrispondente uscita come attiva (accesa) o disattiva (spenta)
utime.sleep(1) crea una pausa di 1 secondo tra le fasi accensione / spegnimento.
while True crea un ciclo infinito .
Il programma può essere semplificato con l'uso dell'istruzione toggle in questo modo
Python
# carico le librerie necessarie
from machine import Pin
import utime
# salvo in una variabile il pin collegato al LED interno (built-in)
# lo imposto in modalità OUTPUT
led1 = Pin(25, Pin.OUT)
# cliclo all'infinito
while True:
led1.toggle()
utime.sleep(1)
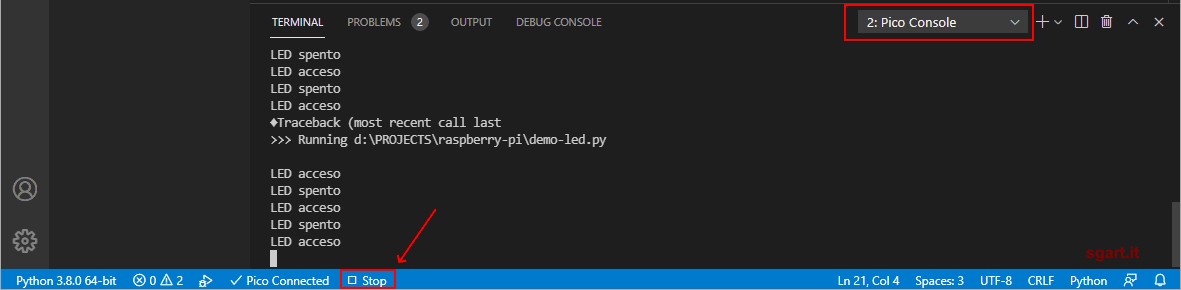
Possiamo mandarlo in esecuzione direttamente sul Pico tramite il pulsante Run senza doverlo caricare (upload)Rune fermalo con StopRunning & Stopmentre nella console vengono visualizzati gli output dei comandi print.
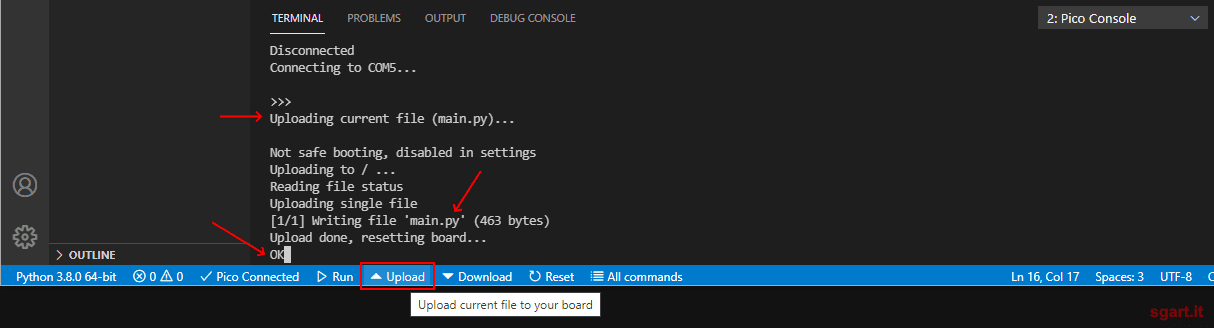
Upload
Tramite il pulsante Upload (nella barra in basso), è possibile caricare il file selezionato sul Pico in modo da renderlo persistente e disponibile anche in caso di riavvioUpload file selezionato
Attenzione in questo caso (upload) il file deve assolutamente chiamarsi main.py, altrimenti non verrà eseguito nessun programma.
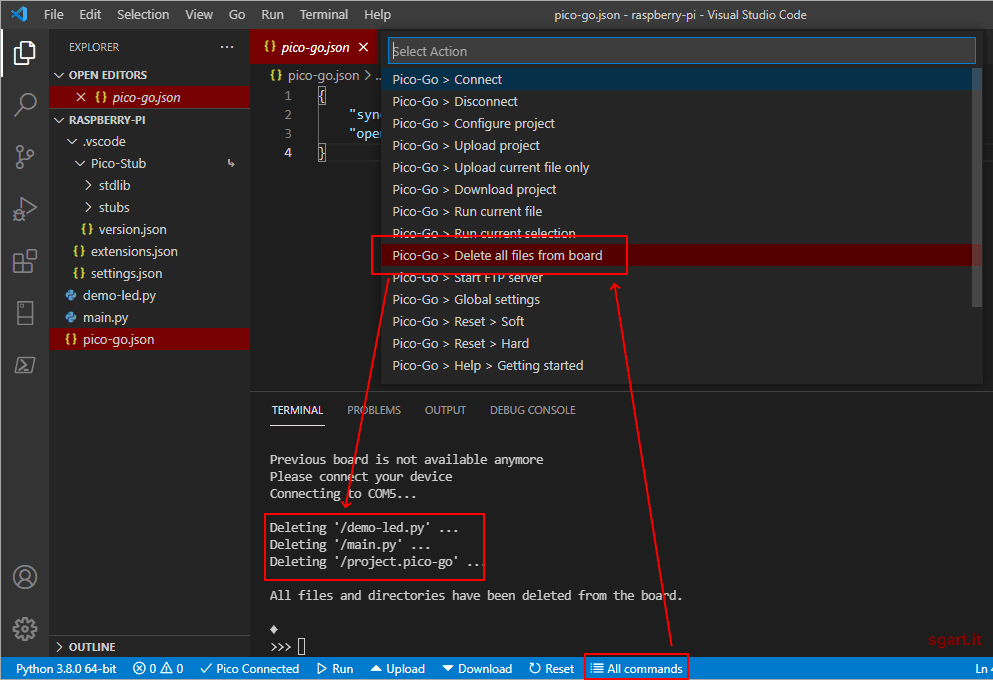
Cancellazione
Prima di partire con un nuovo progetto può essere utile cancellare tutto il contenuto del Pico tramite il comando All commands / Delete all files from boardCancella tutti i file dal Pico